
雷达通信频谱共享及一体化:综述与展望
雷 达 学 报-2021年6月
刘 凡① 袁伟杰*②原进宏*②张 健③ 费泽松④ 周建明④
论文概要
1、雷达通信一体化在现阶段的背景。
2、雷达通信一体化技术在多个领域的应用场景。
3、讨论雷达通信同频共存和一体化系统的研究进展。
4、该领域内的若干开放问题。
RCSS技术包含两条研究路径 雷达与通信的频谱共享(Radar and Communication Spectrum Sharing, RCSS)

应用场景
1、雷达与商用无线通信系统的共存。
2、5G车联网毫米波定位。
3、WiFi室内定位及动作识别。
4、无人机感知与通信。
5、多功能射频系统。
6、雷达辅助的低截获概率(Low-Probability-of_x0002_Intercept, LPI)通信。
7、无源雷达 (Passive Radar, PR)。
雷达与通信同频共存的主要研究问题
1、干扰信道估计。
与传统的通信系统间基于导频的信道估计不同,雷达所采用的工作模式、波形设计以及信号处理都与通信系统全然不同,因而传统信道估计方法往往并不适用。
2、发射机设计。
在获取干扰信道信息以后,需要在发射端进行信号设计、波束成型和预编码等操作,以克服雷达与通信
之间的互干扰,并尽量保证两者的性能指标不受太大影响。
3、 接收抗干扰设计。
在雷达与通信共存场景下,接收机可能会同时收到雷达回波与通信信号。由于两种信号处于同一频段,
往往需要对其进行分离,并对干扰信号进行抑制。
雷达通信一体化的主要研究问题
1、雷达通信一体化信息论。
目标检测性能由检测概率/虚警概率给出,目标参数估计方差的最优下界则由Cramér-Rao下界给出。
需要在此基础上建立新的感知通信一体化信息论,探明两者的最佳性能边界及性能折中。
2、雷达通信一体化信号处理。
雷达通信一体化的信号处理具体包括一体化波形设计、联合发射波束成型、联合信号接
收等。总体可以归纳为时频域和空域信号处理两个方面。
3、 雷达通信一体化协议及系统架构设计。
为实现雷达与通信体制的进一步融合,需要设计新的传输协议与系统架构,以实现雷达与通信功能
的互不干扰甚至协同传输。
雷达与通信同频共存研究现状
1、机会频谱共享。
雷达是频谱的主要用户(primary user),通信系统则是次级用户(secondary user)。
2、干扰信道估计。
在进行预编码设计之前,首先需要获取雷达与通信系统之间的干扰信道状态信息。
3、具有闭式解的预编码方案。
在获取干扰信道以后,为保证雷达与通信系统真正同时同频工作,且互不干扰,可以在雷达或通信端进行预编码设计来消除干扰。
4、基于凸优化方法的预编码设计。
其仅对接收信号矩阵的部分元素进行采样,然后在接收端利用矩阵完成算法近似恢复出完整的雷达信号,从而达到节省计算资源的目的。
5、接收机设计。
雷达通信一体化研究现状
1、雷达通信一体化系统的信息论研究。
在点目标模型下,雷达通常需要估计目标的距离、速度和方位角这3个重要参数,分别对应于雷达信号的3个维度:快时间域(fasttime,即单个脉冲内时间)、慢时间域(slow time,即脉冲个数)和空间域。在这3个维度,可以将信号经过采样后划分为多个分辨单元,每个单元对应了一个特定的目标距离、速度和角度。而对回波的处理,就是通过脉冲压缩、傅里叶变换和接收波束成型等操作,判断其在哪个单元内具有最大的响应,从而将该分辨单元作为目标参数的估计[75]。这就启发我们,可以将每一个分辨单元视作一个“星座点”,从而对雷达获取目标信息的“速率”进行度量。
2、雷达通信一体化系统的时频域信号处理。
雷达通信一体化系统的一个核心问题就是一体化波形设计,即设计一种新型复用波形,使之既能携带通
信信息,又能用于雷达目标探测。
3、雷达通信一体化系统的空域信号处理。
展望
1、安全和隐私问题。
2、机器学习方法。(区分通信信号和雷达信号)
3、通信与感知一体化信息论。
4、面向高动态场景的新型一体化波形。
Integrated Sensing and Communication with Reconfigurable Intelligent Surfaces:Opportunities, Applications, and FutureDirections
——Rang Liu, Ming Li, Honghao Luo, Qian Liu, and A. Lee Swindlehurst
IEEE Wireless Communications • February 2023
Background
当5G更广阔的发展,6G奔向了万物互联的模板,ISAC-融合雷达WIFI信号处理等多个设备的信息——及通感一体化。
Integrated sensing and communication
(ISAC) encourages mutual assistance by sharing information to improve communication and sensing functionalities, contributing to improved performance interms of spectral/energy/hardware/cost efficiency.
RIS
generally a two-dimensional planar array consisting of large numbers of passive elec-tromagnetic elements, each of which can inde-pendently adjust the properties of the incident signals.
RIS has been deemed as an important enabling technology for future 6G networks owing to its ability to reshape electromagnetic environments in an energy/hardware-efficient manner.
可用于改善各种系统性能指标,如最大限度地提高光谱效率/和率/
能量效率/保密率/接收能量,最小化发射功率/符号误码率等。
Applications
CRLB: An RIS-enabled sensing system was investigated based on the CRLB metric .
SNR: RISs are deployed near the radar transmitter and receiver to facilitate steering trans-mit signals toward the target and collecting target returns for the radar receiver.
DoA Estimation: An RIS-assisted unmanned aerial vehicle (UAV) swarm system was proposed.
Localization and Mapping: Deploying RIS can also efficiently improve localization and mapping accuracy, resolution, and coverage.
Applications of RIS in ISAC Systems
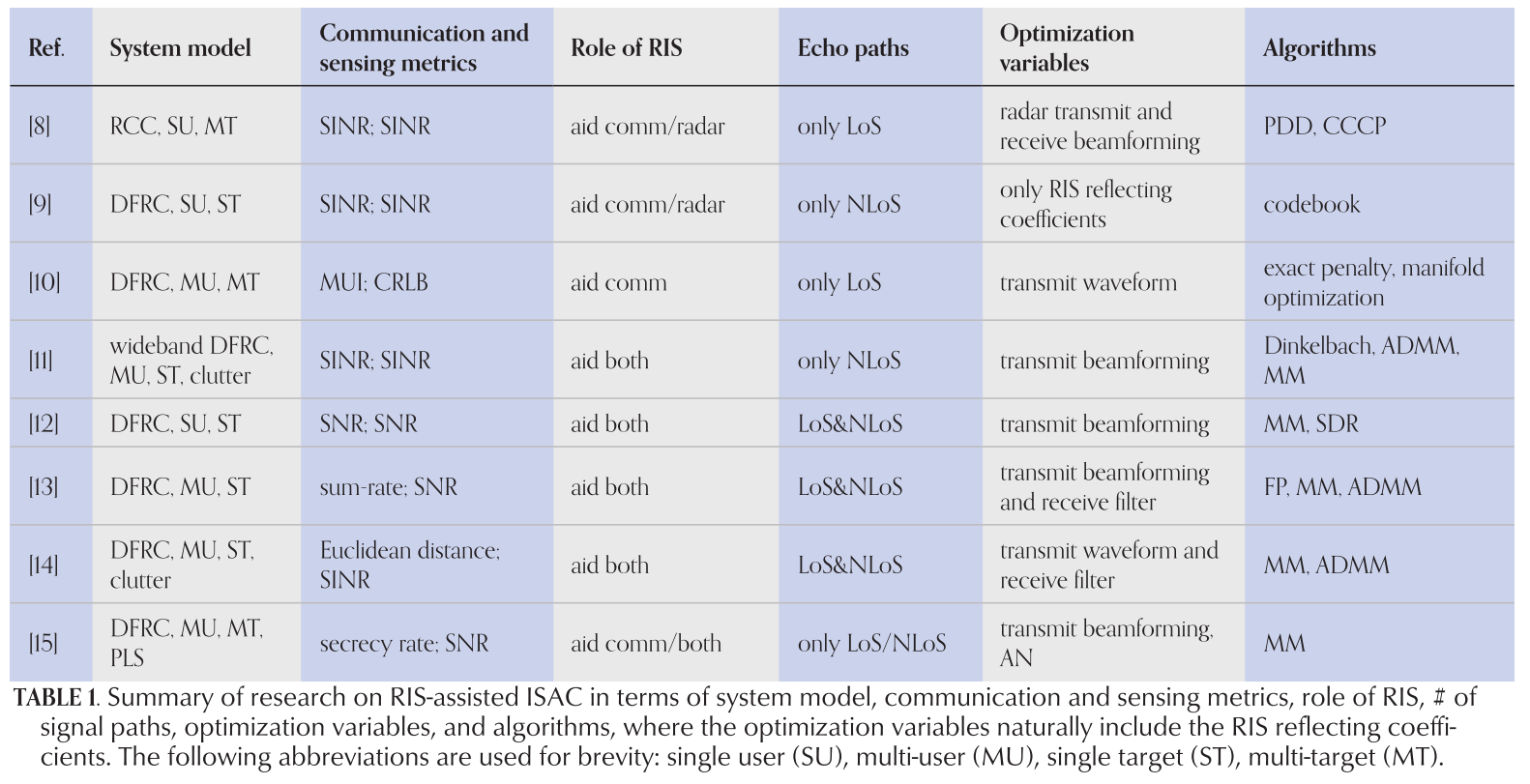
RIS-Assisted ISAC Systems
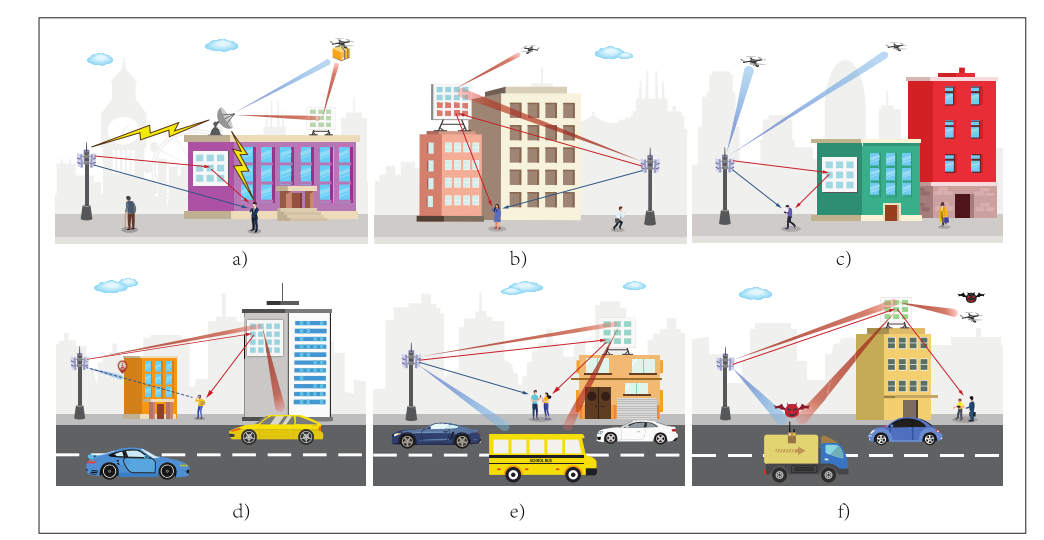
Deployment in RCC Systems: RIS creates an opportunity to address the critical interference management issue in RCC systems. By intel-ligently manipulating the propagation environment, deploying RISs can boost desired signals __ __ and suppress undesired signals .
Deploymentin DFRC Systems: In DFRC systems, RIS provides additional DoFs for the dual-functional waveform design,leading to enhanced trade-offs between communication and sensing performance for diverse applications.
a) RIS辅助RCC系统中的干扰管理;
b)自适应划分RIS元素,以辅助DFRC系统的传感和通信功能;
c) RIS只在雷达和目标之间的LoS链路相对较强的DFRC系统中协助通信;
d) RIS在BS和目标/用户之间的直接路径被阻塞的DFRC系统中协助传感和通信;
e)更一般的ris辅助DFRC系统,LoS和NLoS链路对传感和通信都有不可忽视的影响
f)一个ris辅助的DFRC系统,目标是一个潜在的窃听者。
深度强化学习在自动驾驶系统中的应用综述
韩胜明,肖 芳,程纬森
2023 年 7 月
西华大学学报(自然科学版)
论文概要
1、深度强化学习的主要类别以及研究进展
2、对自动驾驶系统关键技术进行详细剖析
3、深度强化学习(DRL)在自动驾驶系统中的应用前景。
4、 DRL 的未来的发展方向。
深度强化学习
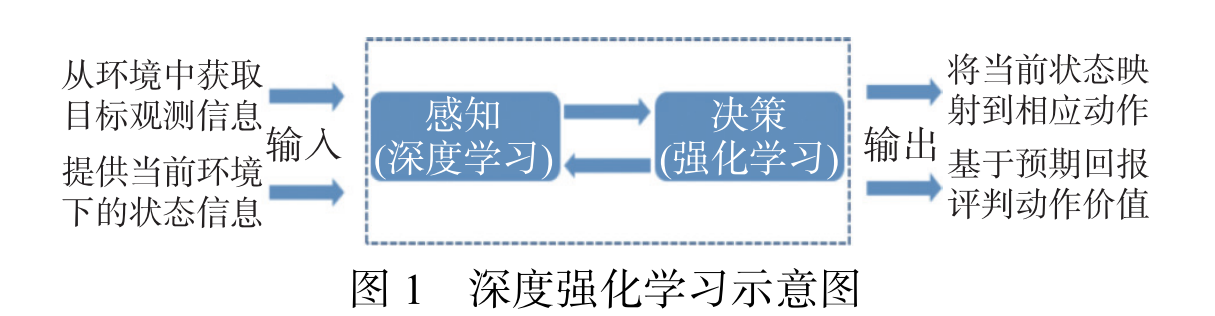
DRL是将深度学习引入强化学习领域的一种方法,以处理更复杂的任务和数据,而深度学习是一种广泛应用于各种机器学习任务的方法。强化学习是DRL的基础,它提供了DRL问题的核心框架。
基于值函数的深度强化学习算法
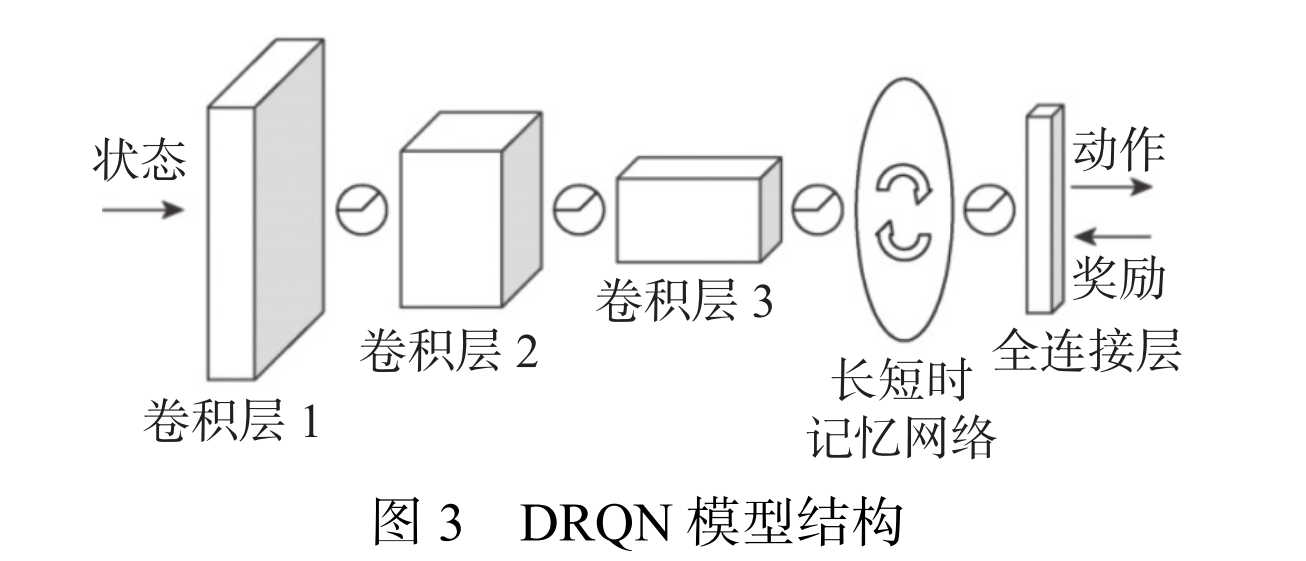
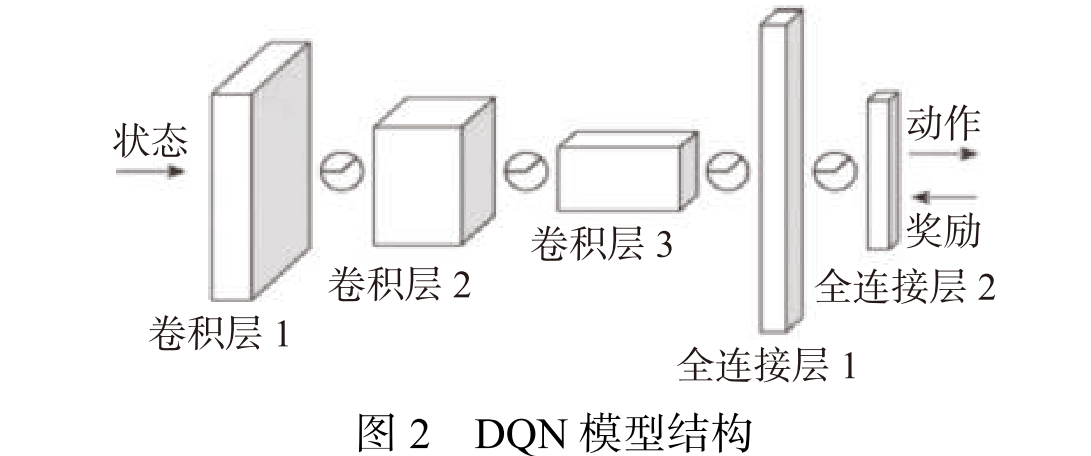
Mnih等将神经网络(CNN)与 Q 学习算法进行结合,
提出了 DQN,该模型主要用于处理基于视觉感知
的控制任务。
DRQN模型就是在基于竞争架构的 DQN基础上引入深度循环 Q 网络,通过 DRQN模型,Agent 可在策略评估过程中更快地识别出正确的行为。
基于策略梯度的深度强化学习算法
基于策略梯度的深度强化学习方法是一种通过不断优化策略获得最优策略的方法,主要通过不断优化策略的目标函数,获取策略最大奖励,最终在策略空间中寻找最优策略。
主要策略有
AC 算法(动作评价算法)
A2C 算法(优势动作评价算法)
A3C 算法(异步优势动作评价算法)
区别
目标函数:基于值函数的方法通过最大化价值函数来指导代理的决策,而基于策略梯度的方法直接优化策略,最大化期望奖励。
输出:基于值函数的方法输出的是价值函数的估计值(V或Q),而基于策略梯度的方法输出的是一个策略,用于选择动作。
稳定性:基于策略梯度的方法在训练过程中通常更加稳定,因为它们直接关注了策略的改进,而不是通过间接估计价值函数。
自动驾驶系统关键技术
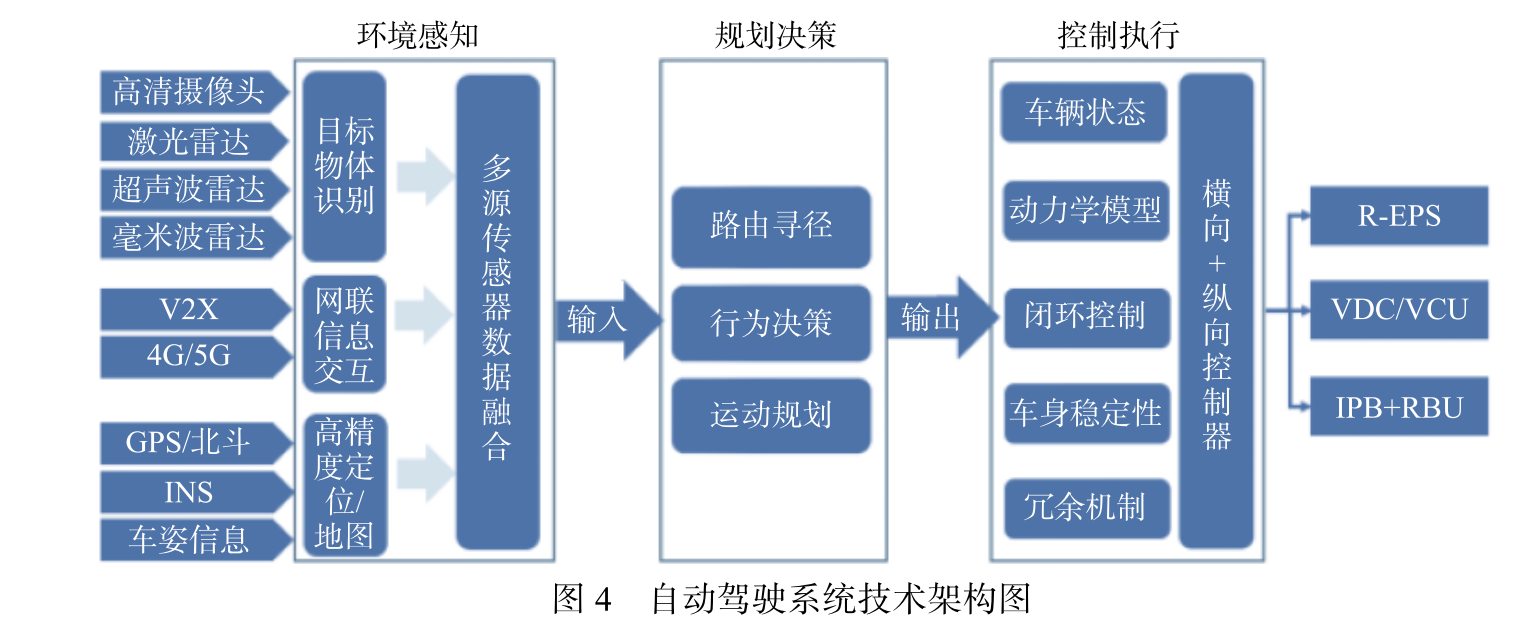
DRL在环境感知领域的应用现状
视觉控制:如何通过不同控制任务间迁移的可迁移状态用于减少训练样本的大小。利用 DRL 来训练 CtrlFormer 模型可以在不发生灾难性遗忘的情况下学习和迁移多任务表示。——解决如何高效地将 Transformer 移植到视觉控制中。
视觉导航:当前基于目标驱动的视觉导航任务存在泛化能力弱、数据效率低等问题。
信息问题:自动驾驶系统怎么从 2D-RGB图像获取交通参与者 6D-pose(3 个自由度的位移和 3 个自由度的空间旋转)。
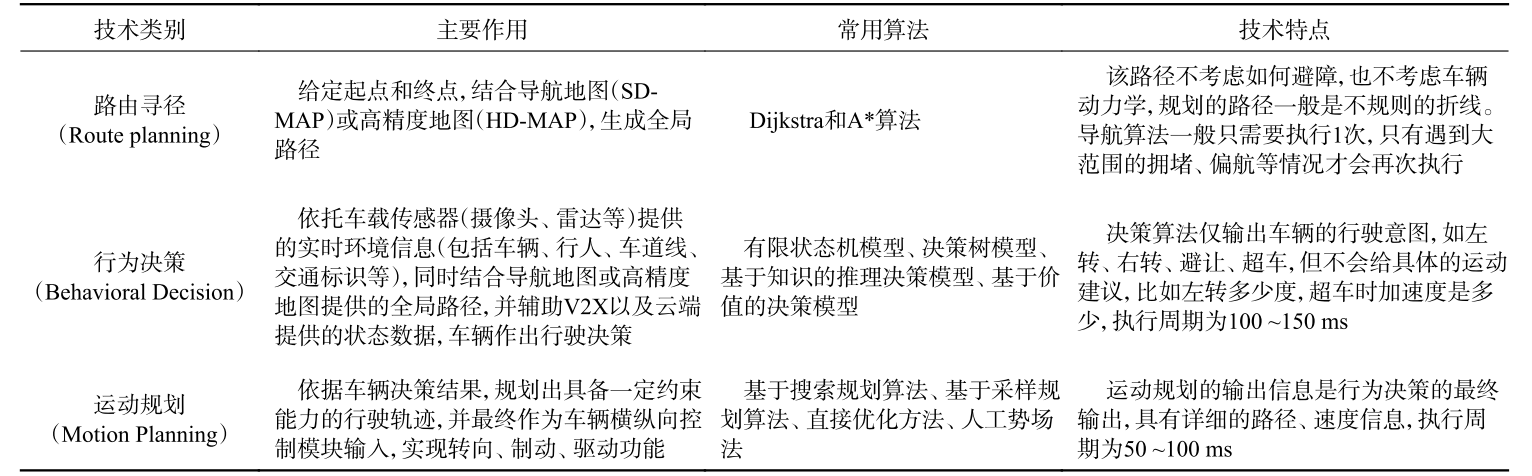
DRL在决策规划领域的应用现状
DRL在控制执行领域的应用现状
常规控制方法主要包括 PID 控制、最优控制、模型预测控制(MPC)
等类型,基于受控对象的数学模型实现闭环控制,需要建立精准的
数学模型。
智能控制方法拥有基于大量数据的自主学习能力,通过数据驱动 Agent 可适应各种未知的复杂环境,在自动驾驶领域得到快速应用,主要包括专家控制(ECS)、模糊控制(FL)、滑模控制(SMC)、CNN和 DRL 等。
基于 DRL 控制方法不需要直接建立精准的数学模型,而是直接在系
统交互过程中对控制策略进行在线学习并不断优化迭代。
基于深度强化学习算法融合前车运动随机性的自动跟随控制策略。
基于深度强化学习的车道保持控制策略
深度强化学习在自动驾驶系统中的应用展望
1、研究 DRL 可解释性,提升功能安全等级。
2、提升DRL 模型的决策稳定性。
3、提升车辆横纵向综合控制能力,使其更加符合人类驾驶习惯,采用DRL 算法获取真实奖励函数,让自动驾驶系统综合控制能力接近人类驾驶水平。